

Фильтрация изображений
Обычно изображения, сформированные различными информационными системами, искажаются действием помех. Это затрудняет как их визуальный анализ человеком-оператором, так и автоматическую обработку в ЭВМ. При решении некоторых задач обработки изображений в роли помех могут выступать и те или иные компоненты самого изображения. Например, при анализе космического снимка земной поверхности может стоять задача определения границ между ее отдельными участками - лесом и полем, водой и сушей и т.п. С точки зрения этой задачи отдельные детали изображения внутри разделяемых областей являются помехой.Ослабление действия помех достигается фильтрацией . При фильтрации яркость (сигнал) каждой точки исходного изображения, искаженного помехой, заменяется некоторым другим значением яркости, которое признается в наименьшей степени искаженным помехой. Что может послужить основой для таких решений ? Изображение часто представляет собой двумерную функцию пространственных координат, которая изменяется по этим координатам медленнее (иногда значительно медленнее), чем помеха, также являющаяся двумерной функцией. Это позволяет при оценке полезного сигнала в каждой точке кадра принять во внимание некоторое множество соседних точек, воспользовавшись определенной похожестью сигнала в этих точках. В других случаях, наоборот, признаком полезного сигнала являются резкие перепады яркости. Однако, как правило, частота этих перепадов относительно невелика, так что на значительных промежутках между ними сигнал либо постоянен, либо изменяется медленно. И в этом случае свойства сигнала проявляются при наблюдении его не только в локальной точке, но и при анализе ее окрестности. Заметим, что понятие окрестности является достаточно условным. Она может быть образована лишь ближайшими по кадру соседями, но могут быть окрестности, содержащие достаточно много и достаточно сильно удаленных точек кадра.
В этом последнем случае, конечно, степень влияния далеких и близких точек на решения, принимаемые фильтром в данной точке кадра, будет совершенно различной.
Таким образом, идеология фильтрации основывается на рациональном использовании данных как из рабочей точки, так и из ее окрестности. В этом проявляется существенное отличие фильтрации от рассмотренных выше поэлементных процедур: фильтрация не может быть поэлементной процедурой обработки изображений.
Задача заключается в том, чтобы найти такую рациональную вычислительную процедуру, которая позволяла бы достигать наилучших результатов. Общепринято при решении этой задачи опираться на использование вероятностных моделей изображения и помехи, а также на применение статистических критериев оптимальности. Причины этого понятны - это случайный характер как информационного сигнала, так и помехи и это стремление получить минимальное в среднем отличие результата обработки от идеального сигнала. Многообразие методов и алгоритмов связано с большим разнообразием сюжетов, которые приходится описывать различными математическими моделями. Кроме того, применяются различные критерии оптимальности, что также ведет к разнообразию методов фильтрации. Наконец, даже при совпадении моделей и критериев очень часто из-за математических трудностей не удается найти оптимальную процедуру. Сложность нахождения точных решений порождает различные варианты приближенных методов и процедур.
3.1. Оптимальная линейная фильтрация.
Уравнение Винера-Хопфа
Пусть




Здесь





В дальнейшем будем придерживаться принятой при цифровой обработке изображений декартовой системы координат с началом в левом верхнем углу кадра и с положительными направлениями из этой точки вниз и вправо.
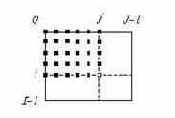
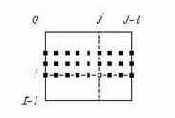
На рис. 3. 1 показаны примеры окрестностей различных типов, изображенные в виде совокупностей точек. Центром окрестностей, рабочей точкой, в которой осуществляется обработка, является точка с координатами

 |
 |
 |
|
а) |
б) |
в) |
|
Рис. 3.1 Примеры окрестностей различных видов |
Некоторые точки окрестности, приведенной на рис. 3.1.б, удовлетворяют принципу каузальности. Вместе с тем, здесь имеются и такие точки, обе координаты которых превышают соответствующие координаты рабочей точки. Фильтрация, опирающаяся на использование окрестностей с сочетанием таких свойств, называется некаузальной.
Окрестности, показанной на рис. 3.1.в, соответствует полукаузальная фильтрация. Одна из координат всех точек окрестности - в данном примере номер строки - не превышает соответствующей координаты рабочей точки. Вторая же координата - в примере номер столбца - у некоторых точек также не превышает соответствующей координаты рабочей точки. Однако среди точек окрестности имеются и такие, у которых эта вторая координата превышает соответствующую координату рабочей точки.
Смысл, заложенный в данную классификацию, состоит в том, что, согласно принципу причинности, на формирование отклика физически осуществимого фильтра не могут оказывать влияния элементы входного сигнала, не поступившие к моменту формирования выходного отсчета. Этот принцип естественным образом «работает» в динамических системах, где все происходящие в них процессы являются временными процессами.
При цифровой обработке изображений часто приходится иметь дело с ранее сформированными изображениями, уже хранящимися в памяти устройства обработки. В этом смысле соотношение координат, строго говоря, уже не играет такой принципиальной причинной роли, как при обработке сигналов в реальном масштабе времени. Вместе с тем, традиционно сложилась описанная выше классификация процедур обработки изображений, которой, в определенной мере, будем придерживаться и мы в последующем изложении.
При линейной фильтрации выходной эффект определяется линейной комбинацией входных данных:

В этом выражении




Наиболее распространенным критерием оптимальности, применяемым для оценки качества обработки, является критерий минимума среднего квадрата ошибок. Применительно к фильтрации запишем его выражение в виде:

где




Оптимизационную задачу (3.3) нетрудно свести к решению уравнения или системы уравнений.
Для этого вычислим производную от левой части этого выражения по коэффициенту


Входящие в него математические ожидания являются, как нетрудно видеть, отсчетами корреляционных функций, для которых введем следующие обозначения:


С их учетом (3.4) примет более компактный вид:

Считая автокорреляционную






Если разрешить ее относительно всех
Определим средний квадрат ошибок оптимальной фильтрации. Для этого необходимо выполнить возведение в квадрат в выражении (3.3) и учесть в полученном выражении уравнение Винера-Хопфа (3.6). В результате нетрудно получить:

где

Остановимся на анализе изменения средней яркости изображения при его фильтрации.
Вычислив математическое ожидание от обеих частей (3.2), находим:

где принято, что средняя яркость





которое является дополнительным требованием к импульсной характеристике фильтра. Поэтому оптимизационную задачу (3.3) необходимо решать с учетом данного ограничения типа равенства.
Вместо этого часто перед фильтрацией осуществляют вычитание средней яркости
3.2. Масочная фильтрация изображений
при наличии аддитивного белого шума
Распространенным видом помехи является белый шум, аддитивно воздействующий на изображение. Наблюдаемое в этом случае изображение (3.1) имеет вид:

а корреляционная функция шума

Здесь





где




где

Преобразуем также выражение (3.7) для ошибок фильтрации, для чего запишем в явном виде то из уравнений в (3.11), которое соответствует значениям




где

Для того чтобы при решении уравнения (3.11) воспользоваться существующими программными средствами ЭВМ, необходимо выполнить его упорядоченное преобразование к каноническому векторно-матричному виду. Для этого требуется совокупность






В практике цифровой обработки изображений широко используется масочная фильтрация. Ее линейная разновидность является одним из вариантов двумерной КИХ-фильтрации. В качестве маски используется множество весовых коэффициентов, заданных во всех точках окрестности

Визуально эффективность фильтрации можно оценить с помощью рис.3.2. На рис. 3.2.а показан зашумленный портрет (изображение без шума приведено на рис. 1.3.а) при отношении сигнал/шум равном -5дБ.
Результат масочной фильтрации при оптимальном виде ИХ, найденной из (3.11), приведен на рис.3.2.б. Результат фильтрации, выполненной равномерным масочным оператором не приводится, поскольку с визуальной точки зрения он мало отличается от рис.3.2.б. При этом, однако, с количественной точки зрения различия достаточно заметны: если при оптимальной КИХ относительная ошибка




 |
 |
|
а) |
б) |
Рис. 3.2. П.ример масочной фильтрации при  |
Функционирование таких систем, где отсутствует человеческий глаз, полностью подчинено математическим критериям и качество их работы оценивается только математическими показателями. Понятно, что и качество изображений, используемых в этих системах, также должно оцениваться только математическими критериями.
В заключение данного параграфа подчеркнем, что в целом применение описанных процедур фильтрации приводит к существенному снижению уровня шума на изображении. Количественно эффективность данной обработки можно охарактеризовать коэффициентом улучшения отношения сигнал/шум


Улучшение зависит от уровня шума на исходном изображении и составляет в приведенном эксперименте




3.3. Рекуррентная каузальная фильтрация изображений
Проблема борьбы с шумом не решается полностью применением масочных фильтров по следующим причинам. Во-первых, ограниченность размера окрестности, используемой масочным фильтром, приводит к его потенциально ограниченной способности к подавлению шума. Это проявляется при значительном уровне шума на изображении - в меньшей степени при оптимальном выборе КИХ, сильнее при неоптимальной КИХ. Можно, конечно, увеличивать размер окрестности, прибегая к использованию КИХ-фильтров с более длинными импульсными характеристиками. Однако при этом усиливается второй недостаток масочного фильтра, состоящий в его и без того достаточно высокой вычислительной трудоемкости.
В настоящее время отсутствуют методы двумерной фильтрации, в которых сочетаются предельно достижимое качество фильтрации и низкие требования к вычислительным ресурсам ЭВМ, реализующей обработку. Существует много подходов к решению данной проблемы, но все они для достижения компромисса между точностью и реализуемостью прибегают к тем или иным приближениям. Рассмотрим один из них [3.1].
Идея заключается в использовании двумерного БИХ-фильтра с таким видом импульсной характеристики, при которой его практическая реализация была бы простой, и с такими параметрами этой импульсной характеристики, при которых эффективность фильтрации приближалась бы к потенциально возможной. Создать фильтр с такими свойствами удается на основе аналогии с одномерным фильтром Калмана.
Наиболее простым примером одномерной фильтрации является калмановская фильтрация однородной стационарной гауссовской последовательности, имеющей корреляционную функцию экспоненциального вида

Здесь

При ее наблюдении на фоне гауссовского белого шума оптимальный каузальный фильтр реализуется рекуррентным алгоритмом, который в стационарном (установившемся) режиме фильтрации имеет вид:

Нетрудно установить, что импульсная характеристика этого фильтра имеет экспоненциальный вид:

где




Отталкиваясь от (3.13) как от одномерного аналога, будем находить двумерную БИХ для каузальной фильтрации изображений от некоррелированного шума в виде двумерной экспоненты:

Здесь, как и в случае одномерного фильтра,
Для определения параметра

Замечая, что выражение в круглых скобках является ошибкой фильтрации, представим эту формулу в виде:


Смысл данного выражения состоит в том, что при оптимальной линейной фильтрации ошибка ортогональна всем элементам наблюдаемых данных, используемых при фильтрации. Но тогда нетрудно убедиться и в ортогональности ошибки и результата фильтрации (получаемой оценки)

для чего достаточно вычислить левую часть этого выражения с учетом (3.2) и (3.15).
Для дальнейшего необходимо воспользоваться в (3.16) принятым представлением импульсной характеристики (3.14), в результате данное соотношение превращается в уравнение относительно искомого параметра

С учетом этого, считая, что кадр имеет бесконечные размеры (это позволяет принять бесконечными соответствующие пределы суммирования в (3.2)), можно получить следующее алгебраическое уравнение

относительно параметра

удовлетворяется при



Подставив в (3.7) выражения ИХ (3.14) и корреляционной функции (3.17), можно получить следующую формулу для среднего квадрата ошибок фильтрации:

Подставив далее выражение ИХ (3.14) в (3.2), можно привести выражение отклика фильтра к виду :

Рекуррентный характер алгоритма (3.19) является важным положительным качеством рассматриваемого фильтра. Как следует из (3.19), его работа требует выполнения на каждом шаге обработки всего трех операций умножения и трех суммирования, причем структура алгоритма универсальна и, в частности, не зависит от отношения сигнал/шум. Для сравнения, масочный фильтр с размером окрестности 3
При фильтрации реальных изображений ограниченного размера возникает граничная проблема получения оценок в точках нулевой строки и нулевого столбца. Естественным решением является использование здесь обычной (одномерной) калмановской фильтрации.
Пример применения описанного двумерного фильтра показан на рис. 3.3, где представлен результат эксперимента с тем же портретом и при том же отношении сигнал/шум -5 дБ, что и при испытании масочного фильтра.
 |
|
|
а) |
б) |
|
Рис. 3.3. Пример двумерной рекуррентной фильтрации |

Различие заметно усиливается при более высоком уровне шума. Так, при отношении сигнал/шум -10 дБ имеем соответственно
Необходимо отметить, однако, следующее. Вместе с уменьшением уровня шума при двумерной рекуррентной фильтрации наблюдается более значительная утрата резкости обработанного изображения. Это является проявлением упоминавшихся выше динамических искажений, более сильных при бесконечной импульсной характеристике, чем при конечной.
Во-вторых, рассмотренный двумерный фильтр не является абсолютно оптимальным, поскольку его структура определена волевым решением при выборе ИХ в виде (3.14). Поэтому и получаемое при его помощи ослабление шума не является предельным.
3.4. Применение фильтра Винера для некаузальной
двумерной фильтрации
Потенциально наилучшие результаты обработки изображения, в частности, результаты фильтрации, достигаются при использовании некаузального принципа, поскольку этот принцип основан на применении абсолютно всех исходных данных при обработке каждой точки кадра. Понятно, что при рациональном использования этих данных получаемый эффект максимален. Одним из известных вариантов линейной некаузальной фильтрации изображений является фильтр Винера. Его применение связано с предположением о стационарности изображения. Поскольку наличие краев изображения служит нарушением стационарности, то винеровская фильтрация, не является строго оптимальной. Однако при размерах кадра, значительно превышающих интервал корреляции изображения, влияние границ является малым. Эти соображения служат важным стимулом к применению винеровской фильтрации для борьбы с шумом.
Технически фильтр Винера реализуется при помощи дискретного преобразования Фурье в частотной области. Поэтому, прежде чем рассматривать уравнение Винера-Хопфа, которое остается методологической основой фильтрации помех и в этом случае, нам необходимо познакомиться с двумерным дискретным преобразованием Фурье (ДПФ), некоторыми его свойствами и принципами линейной фильтрации на основе ДПФ.
3.4.1. Двумерное дискретное преобразование Фурье
Обозначим через

двумерное поле (двумерный сигнал), описывающее дискретное изображение размера



Если сигнал



 |
 |
|
а) |
б) |
|
Рис. 3.4. Реальное (а) и периодически продолженное (б) изображения |


Любой периодический сигнал может быть представлен в виде ряда Фурье, но, в отличие от одномерных сигналов, двумерные описываются двумерным рядом Фурье, имеющим вид:

Базисные функции этого двумерного представления - двумерные комплексные экспоненты (иногда называемые комплексными синусоидами)

имеющие, как и сигнал




Коэффициенты Фурье


Выражение (3.22), восстанавливающее сигнал
Заметим, что для точного представления дискретного сигнала
Это и понятно, поскольку сам представляемый сигнал содержит в одном периоде конечное число точек, т.е. имеет конечное число степеней свободы. Ясно, что число степеней свободы в спектре не может отличаться от числа степеней свободы в самом сигнале.
Остановимся на наиболее существенных свойствах двумерного дискретного спектра Фурье. Вычислим спектральные коэффициенты (3.24) в частотных точках


Поскольку при любых целых значениях



означающее прямоугольную периодичность двумерного ДПФ. Следовательно, картина двумерного ДПФ подобна картине двумерного периодически продолженного сигнала, качественно показанной на рис. 3.4.б (если на ней пространственные координаты




Преобразуем соотношение (3.25) следующим образом. Во-первых, вместо частот


которым устанавливается однозначная связь между спектральными коэффициентами в двух различных точках спектрального прямоугольника

Согласно установленному свойству, спектрально- сопряженной зависимостью связаны между собой спектральные коэффициенты, принадлежащие левому верхнему и правому нижнему углам прямоугольника

В заключение данного пункта укажем, что при практическом применении двумерного ДПФ - как прямого, так и обратного, совсем не требуется оперировать периодическими сигналами и спектрами, как это предполагается, казалось бы, преобразованиями (3.22) и (3.24). От этой необходимости избавляют сами соотношения (3.22) и (3.24). В самом деле, прямое преобразование Фурье (3.24) содержит в правой части значения периодически продолженного сигнала
Из сделанных пояснений, имеющих лишь исключительно вычислительное значение, не следует делать вывода об искусственности и ненужности рассмотренных математических моделей периодических полей. При обработке изображений возникают многочисленные задачи, правильное толкование и решение которых возможно только на основе этих математических интерпретаций. Одной из таких важнейших задач является цифровая двумерная фильтрация в спектральной области, осуществление которой связано с выполнением так называемой циклической свертки.
3.4.2. Циклическая свертка
Достоинством обычного преобразования Фурье является то, что с его помощью очень просто выполняется стационарная фильтрация сигналов. Как известно, для этого требуется получить частотный спектр сигнала и частотный коэффициент передачи фильтра.
Затем, перемножив их, определить частотный спектр выходного сигнала, а выполнив обратное преобразование Фурье - найти сам выходной сигнал. Возможно ли применение такой технологии для выполнения двумерной цифровой фильтрации ? Убедимся, что возможно, но с некоторыми оговорками.
Двумерный стационарный (инвариантный к сдвигу) фильтр характеризуют двумерной импульсной характеристикой


Это уравнение обычной свертки, в нем фигурируют обычные, непериодические сигналы и непериодическая ИХ фильтра. При цифровой обработке в ЭВМ не существует частотных спектров, соответствующих таким сигналам и ИХ. Для описания сигнала в частотной области привлекается, как установлено выше, периодически продолженный сигнал

двумерное ДПФ которой



также является периодическим. Покажем, что именно его спектр


Умножим для этого левую и правую части (3.27) на





Выполняя затем во внутренней сумме замену переменных


Таким образом установлено, что именно циклической свертке (3.27) соответствует удобный при практической реализации частотный метод определения выходного сигнала. Необходимо иметь в виду, что та фильтрация, к осуществлению которой обычно стремятся при решении конкретных задач, описывается обычной сверткой (3.26), а не циклической (3.27). Поэтому остается выяснить, в каком соотношении находятся эти две вычислительные процедуры. Не нарушая общности, для большей простоты и наглядности рассмотрим этот вопрос на примере одномерной фильтрации. Сигнал на выходе одномерного фильтра определяется сверткой


в обычном и циклическом вариантах соответственно. Рис. 3.5 поясняет процесс
 |
 |
 |
|
|
а) |
б) |
в) |
|
|
Рис. 3.5. Сравнение обычной и циклической свертки |




В заключение отметим, что характер различий обычной и циклической сверток при фильтрации двумерных цифровых сигналов остается таким же, как для одномерных сигналов. Аналогичны и меры, исключающие нежелательные эффекты циклической свертки.
3.4.3. Решение уравнения Винера-Хопфа в циклическом приближении
Вернемся к задаче некаузальной фильтрации шума на изображении. Оптимальный линейный фильтр определяется и в этом случае уравнением Винера-Хопфа (3.6), в котором для начала область существования

Дискретный винеровский фильтр удается легко найти в циклическом приближении. Для этого требуется вместо реальных функций




Периодичность функций, входящих в уравнение (3.32), позволяет применить к его обеим частям двумерное ДПФ, подобно тому, как это было сделано выше применительно к уравнению (3.27). В результате получаем:

В этом выражении


Найденное решение дает эффективный способ осуществления оптимальной линейной фильтрации изображения.
Его выполнение требует знания спектральных плотностей мощности и опирается на применение к обрабатываемому изображению дискретного преобразования Фурье.
Не следует, однако, забывать, что переход от уравнения (3.31), определяющего истинно оптимальную характеристику фильтра, к уравнению (3.32), позволяющему найти ее периодически продолженный аналог, был выполнен без достаточного обоснования. Поэтому ничего нельзя пока сказать о том, в какой степени найденное решение близко к истинно оптимальному. Для ответа на этот вопрос рассмотрим снова для простоты одномерные аналоги уравнений (3.31) и (3.32), имеющие вид:


Рис. 3.6 иллюстрирует формирование сумм, входящих в правые части этих равенств при некотором произвольном значении сдвига

 |
 |
|
а) |
б) |
|
Рис. 3.6. Сравнение обычного и циклического уравнений Винера-Хопфа |
Если же интервал

Напомним также, что в данном пособии обсуждается уравнение Винера-Хопфа для стационарных сигналов и изображений. Поэтому вблизи границ обрабатываемого кадра, где само их существование приводит к нарушению этого условия, обработка отклоняется от оптимальной.
На рис. 3.7 приведен пример работы фильтра Винера. Как и ранее эксперимент выполнен при отношении сигнал/шум


оценка результата. Хотя нельзя не отметить, что это достигается ценой большей, чем при других методах, дефокусировки изображения. В этом проявляется общее диалектическое противоречие между борьбой с помехами и
 |
 |
|
а) |
б) |
|
Рис. 3.7. Пример винеровской фильтрации шума при |
Проведение обработки изображений при помощи фильтра Винера требует использования спектральной плотности мощности изображения. Существуют различные способы получения необходимой информации. Один из них основан на предварительном измерении требуемых характеристик по реальному изображению. Полученные при этом спектральные плотности вводятся в ЭВМ в виде таблиц, позволяя задать коэффициент передачи в численном виде. Другой способ, примененный и в представленном эксперименте, состоит в использовании некоторой математической модели изображения, вид спектрально-корреляционных характеристик которой известен. В этом случае реальное изображение используется для измерения только отдельных параметров, входящих в используемую математическую модель. При проведении эксперимента, описанного выше , в частности, использовалась модель изображения в виде гауссовского двумерного поля с корреляционной функцией (3.17), а измерялись коэффициент одношаговой корреляции
Анализ эффективности метода будет неполным, если не сделать оценки вычислительной эффективности реализующей его процедуры. Для вычисления ДПФ разработаны эффективные вычислительные методы, воплощенные в процедурах быстрого преобразования Фурье (БПФ). Количество комплексных умножений, составляющих основную трудоемкость двумерного БПФ, оценивают числом



3.5. Байесовская фильтрация изображений
При всех рассмотренных ранее методах фильтрации с самого начала закладывалось отыскание фильтра в классе линейных систем. Отсюда следует, что могут существовать нелинейные процедуры, обладающие более высокими качественными характеристиками, чем рассмотренные выше. Для их отыскания необходим более общий подход к фильтрации, чем тот, который опирается на решение уравнение Винера-Хопфа. Общепринятая достаточно универсальная идеология фильтрации использует байесовский принцип. Ее применение позволяет, по крайней мере теоретически, создавать как линейные, так и нелинейные алгоритмы фильтрации. Кроме того, этот принцип помогает выяснить, при каких условиях линейные процедуры фильтрации приводят к наивысшему качеству обработки и, следовательно, являются абсолютно оптимальными.
Отметим, однако, с самого начала основные недостатки байесовской фильтрации изображений. Первый является общим для байесовских методов вообще и заключается в очень высоких требованиях к объему и характеру данных, содержащихся в математических моделях сигналов и помех, удовлетворить которым на практике удается далеко не всегда.
Второй связан со спецификой изображений как двумерных сигналов, что приводит к колоссальным вычислительным трудностям при попытке прямого использования этого подхода. Последнее делает актуальной разработку таких методов, которые способны преодолеть данное ограничение. Достичь этого обычно удается ценой определенной потери качества обработки. Поэтому дело сводится к поиску таких методов, при которых потеря качества являлась бы приемлемой.
3.5.1. Сущность байесовской фильтрации
Полагаем, что на входе фильтра действует сигнал

где







куда входит распределение



Поскольку потребителя информации обычно интересует точечное значение сигнала
Оперировать векторными величинами, входящими в (3.38), практически невозможно из-за громадной размерности векторов





Отмеченная сложность байесовских процедур свойственна и фильтрации одномерных сигналов. Вместе с тем, в области одномерной фильтрации были получены блестящие решения проблемы, основанные на использовании марковских моделей сигналов и помех. В указанных работах [3.4-3.6] предпринимались разнообразные попытки распространить идеи марковской фильтрации на двумерные сигналы. Прежде чем остановиться на одном из методов, развитых в работах [3.6,3.8], рассмотрим кратко одномерную марковскую фильтрацию дискретных сигналов, поскольку она составляет основу двумерных процедур.
3.5.2. Марковская фильтрация одномерных последовательностей
Рассмотрим одномерную задачу фильтрации, когда входные данные представлены в виде одномерной последовательности наблюдений:

Здесь все обозначения имеют тот же смысл, что и в (3.37) для двумерных сигналов. Для пояснения сути марковской фильтрации рассмотрим простейший вариант задачи: будем считать помеху независимым процессом (т.е.

На пояснении последнего остановимся подробнее. Последовательность является марковской, если ее совместное распределение вероятностей может быть представлено в виде:

Данное выражение содержит в правой части одномерное распределение




Часто индексы



В соотношение (3.41) входит распределение последнего элемента и цепочка одношаговых распределений перехода в обратном времени

Марковские процессы обладают разделяющим свойством, позволяющим представить их распределение еще в одной форме, полезной для разработки оптимальных процедур фильтрации. В соответствии с этим свойством любой элемент последовательности




Последнее соотношение дает возможность построения некаузального фильтра, формирующего результат фильтрации при помощи очень удобных, экономичных вычислительных процедур.
Это является результатом того, что апостериорное распределение вероятностей для произвольного


В правую часть (3.43) входят три частичных АРВ элемента




Согласно (3.43) получение оценки складывается из двух этапов. На первом этапе из локальных входных данных формируются локальные АРВ, которые на втором этапе объединяются в окончательное АРВ, используемое далее для получения точечной оценки. Вычислительная сложность этого процесса в значительной степени определяется сложностью формирования локальных АРВ, главным образом находящихся в числителе формулы (3.43), т.к. получение одноточечного АРВ в знаменателе обычно является достаточно простой задачей.
Определение локальных АРВ очень сильно облегчается при использовании марковских свойств последовательностей. Оказывается, что они могут вычисляться при помощи рекуррентных соотношений. Так, например АРВ


Здесь



Аналогично выглядит и рекуррентное соотношение для локального АРВ



В целом, процедура фильтрации, основанная на приведенных соотношениях, выглядит следующим образом. Сначала выполняется обработка последовательности в прямом времени, в результате чего во всех точках формируется АРВ


3.5.3. Двухэтапная марковская фильтрация изображений
Рассмотрим подход к фильтрации изображений, основу которого составляет использование двумерных, но неполных входных данных, а также наличие у них марковских свойств. Рассмотрим получение оценки изображения в произвольной точке кадра с координатами
Будем считать, что для получения оценки


Рис. 3.8 иллюстрирует геометрию задачи.
 |
|
Рис. 3.8. Геометрия использования данных при двухэтапной фильтрации |



Будем, кроме того, рассматривать такие случайные поля


где верхние индексы также указывают на принадлежность векторов соответствующим лучам. Соотношение (3.45) означает, что значения сигнала на любой строке и на любом столбце изображения условно независимы, если известно значение сигнала




Используя эту математическую модель изображения в случае независимой помехи

Соотношение (3.47) служит теоретической базой для построения оптимальных двухэтапных процедур фильтрации, использующих неполные данные исходных наблюдений. Полное АРВ, основанное на всех привлекаемых при фильтрации данных



Рассмотренный вариант обработки является разновидностью некаузальной фильтрации, поскольку в получении оценки участвуют элементы входного наблюдения, имеющие как большие, так и меньшие значения аргументов, чем у оцениваемого сигнала.
Если в процессе обработки опираться только на данные двух лучей



Соотношение (3.47) дает возможность выполнить двумерную обработку изображения в виде некоторой совокупности одномерных процедур. Весь цикл вычислений можно представить следующим образом. Выполняется обработка всех строк изображения в прямом направлении (слева направо), в результате чего в каждой точке образуется распределение





С точки зрения скорости вычислений данная технология обработки является очень привлекательной. Следует, вместе с тем, иметь в виду, что для ее реализации необходим достаточный запас оперативной памяти, чтобы хранить промежуточные результаты обработки, к числу которых относятся все частные АРВ. В этом отношении вычислительный процесс может быть существенно оптимизирован, поскольку ни одно из частных АРВ не представляет окончательной ценности. Это позволяет, например, не хранить отдельно пять различных распределений, входящих в правую часть (3.47), а по мере получения очередного сомножителя формировать произведение, именно которое и следует хранить в памяти до завершения вычислений. Очевидно, что структура вычислений, как и в одномерном случае, удобна для реализации при помощи многоканального вычислительного устройства.
Структура распределений очень сильно влияет на требуемые объем вычислений и ресурс памяти. Имеются очень “удобные” в этом смысле виды распределений. Например, если для описания изображения применима модель случайного поля с гауссовским распределением, то для представления каждого из частных и финального АРВ в (3.47) требуется наличие всего двух параметров - математического ожидания и дисперсии. Именно это и определяет конкретный характер и количество вычислений в процессе фильтрации, а также объем необходимой памяти.
Другим примером такого рода может служить математическая модель бинарного случайного поля, которое в различных точках принимает значения


Существует отдельный вопрос, связанный с применимостью марковских двумерных моделей (3.45), (3.46), позволяющих построить эффективные двухэтапные процедуры. Его изучение является достаточно непростой теоретической задачей. В частности, в работах [3.6.,3.8] установлено, что и для гауссовских, и для бинарных случайных полей необходимым и достаточным условием применимости (3.45) является возможность представления двумерных корреляционных функций этих полей в разделимом виде, т.е. в виде произведения двух множителей, один из которых описывает корреляцию изображения по строке, а второй - по столбцу. Дополнительные требования, вытекающие из (3.46), сводятся к существованию марковских свойств у одномерных последовательностей в горизонтальном и вертикальном сечениях изображения. В двух указанных примерах наличие таких свойств связано с экспоненциальным видом корреляционных функций этих одномерных сечений изображения.
На рис. 3.9 приведены результаты экспериментальной проверки двумерных двухэтапных алгоритмов фильтрации изображения. На рис. 3.9.а показано тестовое бинарное изображение “острова”, на рис. 3.9.б - изображение, искаженное белым гауссовским шумом (отношение сигнал/шум

Рис.3.9. в иллюстрирует применение простой поэлементной пороговой обработки (рис. 1.4.а), при которой порог определялся так, чтобы реализовывалась одноточечная процедура максимума апостериорной вероятности. На рис. 3.9.г, 3.9.д и 3.9.е показаны различные результаты двухэтапной фильтрации. Первый из них соответствует одномерной каузальной фильтрации, второй - также одномерной, но некаузальной, а третий - двумерной некаузальной процедуре. Визуальное сравнение результатов говорит об очень низком качестве поэлементной обработки. При ее использовании вероятность
 |
 |
 |
|
а) |
б) |
в) |
 |
 |
 |
|
г) |
д) |
е) |
|
Рис. 3.9. Двухэтапная марковская фильтрация изображения |
3.6. Медианная фильтрация
Все линейные алгоритмы фильтрации приводят к сглаживанию резких перепадов яркости изображений, прошедших обработку. Этот недостаток, особенно существенный, если потребителем информации является человек, принципиально не может быть исключен в рамках линейной обработки. Дело в том, что линейные процедуры являются оптимальными при гауссовском распределении сигналов, помех и наблюдаемых данных. Реальные изображения, строго говоря, не подчиняются данному распределению вероятностей.
Причем, одна из основных причин этого состоит в наличии у изображений разнообразных границ, перепадов яркости, переходов от одной текстуры к другой и т. п.. Поддаваясь локальному гауссовскому описанию в пределах ограниченных участков, многие реальные изображения в этой связи плохо представляются как глобально гауссовские объекты. Именно это и служит причиной плохой передачи границ при линейной фильтрации.
Вторая особенность линейной фильтрации - ее оптимальность, как только что упоминалось, при гауссовском характере помех. Обычно этому условию отвечают шумовые помехи на изображениях, поэтому при их подавлении линейные алгоритмы имеют высокие показатели. Однако, часто приходится иметь дело с изображениями, искаженными помехами других типов. Одной из них является импульсная помеха. При ее воздействии на изображении наблюдаются белые или (и) черные точки, хаотически разбросанные по кадру. Применение линейной фильтрации в этом случае неэффективно - каждый из входных импульсов ( по сути - дельта-функция) дает отклик в виде импульсной характеристики фильтра, а их совокупность способствует распространению помехи на всю площадь кадра.
Удачным решением перечисленных проблем является применение медианной фильтрации, предложенной Дж. Тьюки в 1971 г. для анализа экономических процессов. Наиболее полное исследование медианной фильтрации применительно к обработке изображений представлено в сборнике [3.9]. Отметим, что медианная фильтрация представляет собой эвристический метод обработки, ее алгоритм не является математическим решением строго сформулированной задачи. Поэтому исследователями уделяется большое внимание анализу
эффективности обработки изображений на ее основе и сопоставлению с другими методами.
При применении медианного фильтра (МФ) происходит последовательная обработка каждой точки кадра, в результате чего образуется последовательность оценок. В идейном отношении обработка в различных точках независима (этим МФ похож на масочный фильтр), но в целях ее ускорения целесообразно алгоритмически на каждом шаге использовать ранее выполненные вычисления.
При медианной фильтрации используется двумерное окно (апертура фильтра), обычно имеющее центральную симметрию, при этом его центр располагается в текущей точке фильтрации. На рис. 3.10 показаны два примера наиболее часто применяемых вариантов окон в виде креста и в виде квадрата. Размеры апертуры принадлежат к числу параметров, оптимизируемых в процессе анализа эффективности алгоритма. Отсчеты изображения, оказавшиеся в пределах окна, образуют рабочую выборку текущего шага.
 |
 |
|
а) |
б) |
|
Рис. 3.10. Примеры окон при медианной фильтрации |




Рассмотрим пример. Предположим, что выборка имеет вид:


Видим, что влияние “соседей” на результат фильтрации в текущей точке привело к “игнорированию” импульсного выброса яркости, что следует рассматривать как эффект фильтрации. Если импульсная помеха не является точечной, а покрывает некоторую локальную область, то она также может быть подавлена. Это произойдет, если размер этой локальной области будет меньше, чем половина размера апертуры МФ. Поэтому для подавления импульсных помех, поражающих локальные участки изображения, следует увеличивать размеры апертуры МФ.
Из (3.48) следует, что действие МФ состоит в “игнорировании” экстремальных значений входной выборки - как положительных, так и отрицательных выбросов. Такой принцип подавления помехи может быть применен и для ослабления шума на изображении. Однако исследование подавления шума при помощи медианной фильтрации показывает, что ее эффективность при решении этой задачи ниже, чем у линейной фильтрации [3.9].
Результаты экспериментов, иллюстрирующие работу МФ, приведены на рис. 3.11. В экспериментах применялся МФ, имеющий квадратную апертуру со
стороной равной 3. В левом ряду представлены изображения, искаженные помехой, в правом - результаты их медианной фильтрации. На рис. 3.11.а и рис. 3.11.в показано исходное изображение, искаженное импульсной помехой. При ее наложении использовался датчик случайных чисел с равномерным на интервале [0, 1] законом распределения, вырабатывающий во всех точках кадра независимые случайные числа. Интенсивность помехи задавалась вероятностью



 |
 |
|
а) |
б) |
 |
 |
|
в) |
г) |
 |
 |
|
д) |
е) |
|
Рис. 3.11. Примеры медианной фильтрации |
Рис. 3.11. д показывает изображение, искаженное независимым гауссовским шумом при отношении сигнал/шум

|
масочный фильтр с оптимальн. КИХ |
масочный фильтр с равномерн. КИХ |
двумерный рекуррентн. фильтр |
двумерный фильтр Винера |
медианный фильтр |
|
|
|
0.309 |
0.395 |
0.29 |
0.186 |
0.539 |
|
|
10.2 |
8.0 |
10.9 |
17.0 |
5.86 |
|
Табл.3.1. Сравнение эффективности подавления шума при фильтрации изображений, |
Вместе с тем, как говорилось выше, и что демонстрирует рис. 3.11.е, медианная фильтрация в меньшей степени сглаживает границы изображения, чем любая линейная фильтрация. Механизм этого явления очень прост и заключается в следующем. Предположим, что апертура фильтра находится вблизи границы, разделяющей светлый и темный участки изображения, при этом ее центр располагается в области темного участка. Тогда, вероятнее всего, рабочая выборка будет содержать большее количество элементов с малыми значениями яркости, и, следовательно, медиана будет находиться среди тех элементов рабочей выборки, которые соответствуют этой области изображения. Ситуация меняется на противоположную, если центр апертуры смещен в область более высокой яркости.